RC-Empfänger
Der RC-Empfänger nimmt Befehle vom Sender entgegen und wandelt sie in Signale um, die die Flugsteuerung versteht. Empfänger unterscheiden sich nach Kanalanzahl (z. B. 6, 8, 12, 16), nach Protokoll und Frequenzband. Jeder Kanal entspricht einem Bedienelement am Sender — etwa den vier Hauptachsen (Throttle, Roll, Pitch, Yaw) sowie weiteren Kanälen für Schalter und Funktionen (z. B. Armen, Flugmodus, GPS-Rückkehr usw.).
Nach Ausgangssignaltyp lassen sich Empfänger in mehrere Grundkategorien einteilen. Am ältesten ist PWM (Pulse Width Modulation), bei dem jeder Kanal eine eigene Leitung hat. Das wird vor allem bei Flächenmodellen ohne Flugsteuerung genutzt, wo Servos direkt angesteuert werden. PPM (Pulse Position Modulation) bündelt alle Kanäle auf einer Signalleitung, vereinfacht die Verdrahtung, sendet die Kanäle aber nacheinander, was etwas Latenz verursacht.

Im FPV-Bereich verwendet man heute ausschließlich digitale serielle Protokolle, die alle Kanäle gleichzeitig über eine einzige Leitung übertragen. Das ergibt sehr schnelle Reaktion und eine aufgeräumte Verdrahtung. Üblich sind SBUS (FrSky, Futaba), iBUS (FlySky) und CRSF (für Crossfire und ExpressLRS). Serielle Protokolle bieten neben geringer Latenz auch bidirektionale Kommunikation — der Empfänger kann Telemetrie (Akkuspannung, Link-Qualität, GPS-Position usw.) zurück an den Sender senden.

Der modernste Standard ist ExpressLRS (ELRS), als Open-Source entstanden und zum Standard für FPV geworden. Es bietet geringe Latenz und große Reichweite. ELRS gibt es in zwei Bändern — 2,4 GHz (hohe Rate, ideal für Freestyle/Racing) und 868 MHz (EU) / 915 MHz (USA) (größere Reichweite für Long-Range).
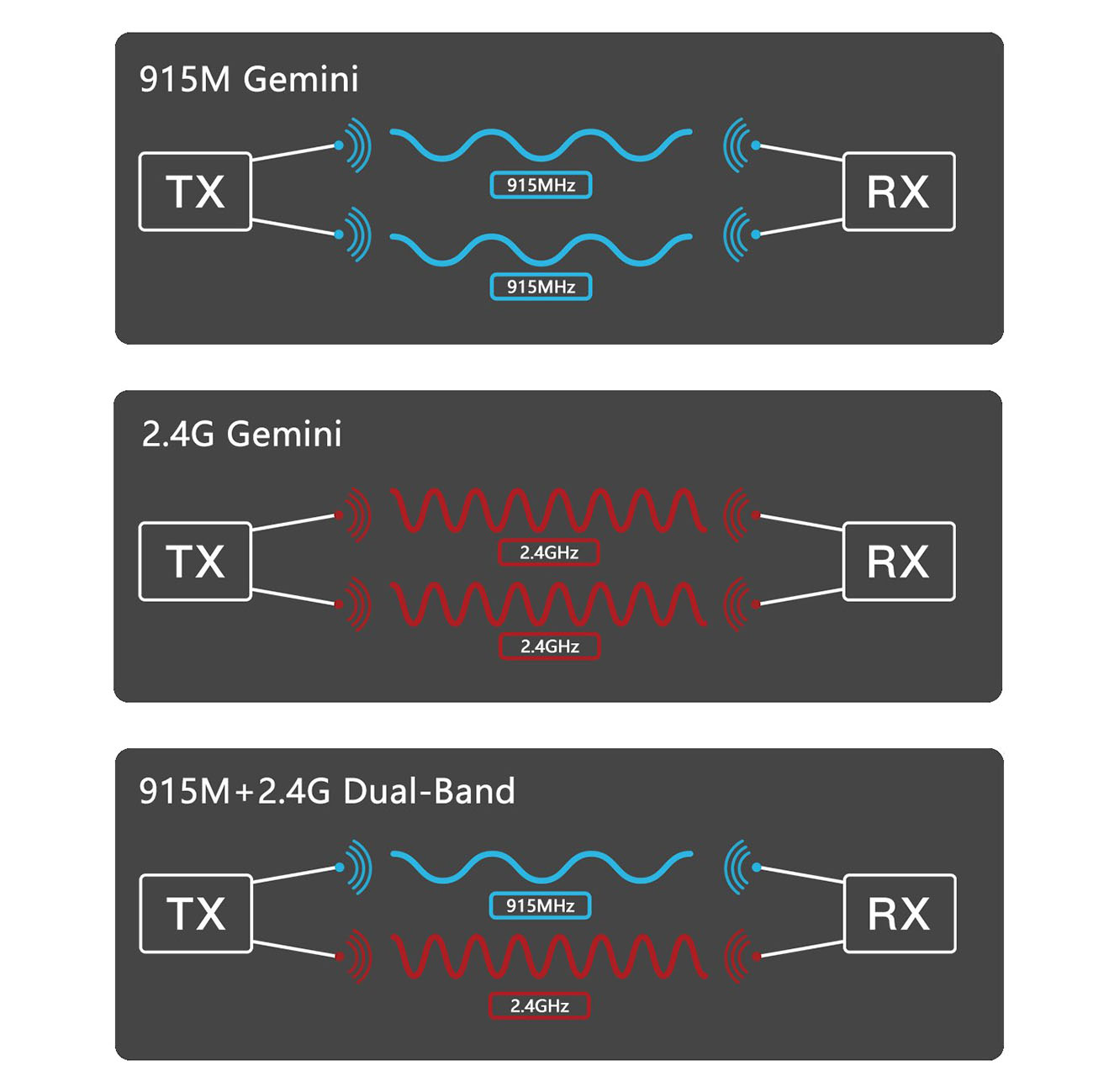
ELRS-Empfänger gibt es in mehreren Ausführungen. Basisvarianten besitzen eine Antenne, weiterentwickelte nutzen Diversity — zwei Antennen, zwischen denen der Empfänger je nach Signalqualität umschaltet. Noch weiter gehen True-Diversity-Empfänger, die zwei vollständige RF-Module besitzen und beide Antennen gleichzeitig auswerten — für maximale Link-Stabilität. Für höchste Zuverlässigkeit kann ELRS im Gemini-Modus betrieben werden: Der Sender hat zwei Sende-Module und kommuniziert mit einem True-Diversity-Empfänger auf zwei unabhängigen Frequenzen im selben Band (2× 2,4 GHz / 2× 868 MHz). Am weitesten geht Xross (XCrossband) — ähnlich wie Gemini, jedoch mit einem Link auf 2,4 GHz und dem anderen auf 868 MHz.
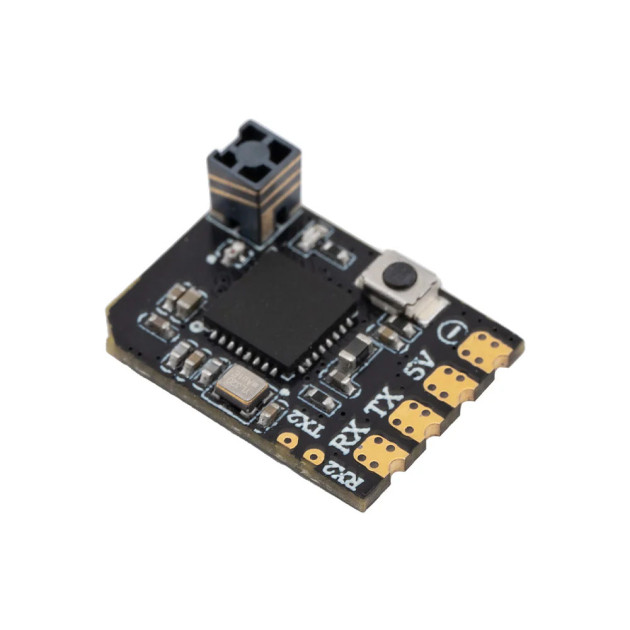
Einige ELRS-Empfänger verwenden statt einer Drahtantenne eine keramische Onboard-Antenne. Sie ist sehr kompakt, hat jedoch geringere Reichweite. Solche Antennen eignen sich gut für kleine Tinywhoops oder Racing-Drohnen, da sie Platz/Gewicht sparen und bei Abstürzen nicht abgerissen werden.
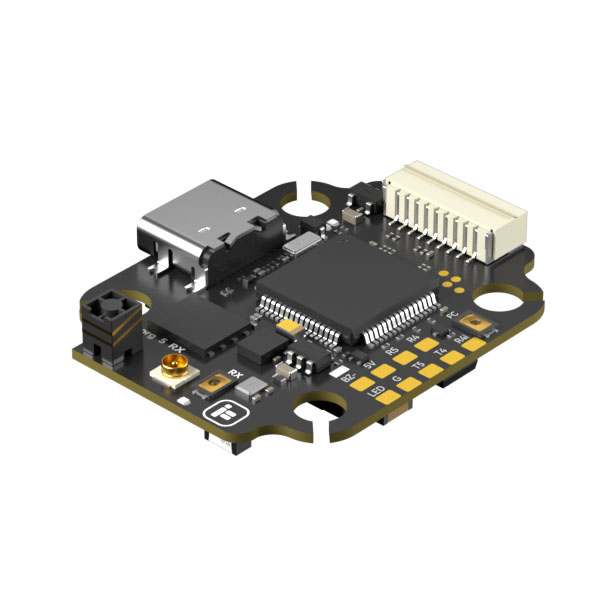
Manche Flugsteuerungen für Racing-Quads oder AIO-Boards für Whoops besitzen einen integrierten ELRS-Empfänger. Die Verbindung zur FC-Mikrocontroller-Einheit erfolgt über UART oder SPI. Bei UART handelt es sich um einen vollwertigen Empfänger mit denselben Funktionen wie externe Modelle. SPI-angeschlossene Empfänger besitzen keine eigene Firmware; der RX-Code ist Teil der FC-Firmware (z. B. Betaflight) — die Konfigurationsmöglichkeiten sind daher eingeschränkt.
Bei der Wahl des Empfängers prüfen Sie stets die Kompatibilität zu Ihrem Sender und ob derselbe Link-Standard unterstützt wird. Achten Sie außerdem auf den Antennentyp (Draht vs. Keramik), die Anschlussart (UART, Steckverbinder oder Lötpads) und darauf, ob der Empfänger Telemetrie unterstützt. Ein passend gewählter und korrekt konfigurierter Empfänger ist entscheidend für die zuverlässige und sichere Steuerung Ihrer FPV-Drohne.